| フィールドサーバとは お問い合わせ English |
| 概要 | 本体 | カメラ | データ収集 | 使用部品 | 図面関係 | 参考資料 | 雑多メモ |
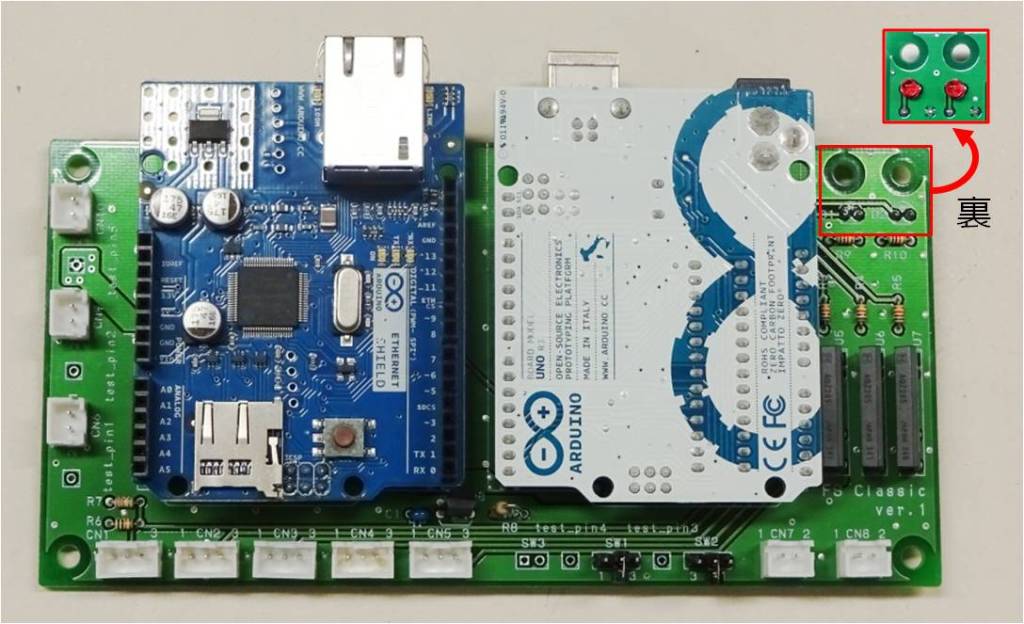
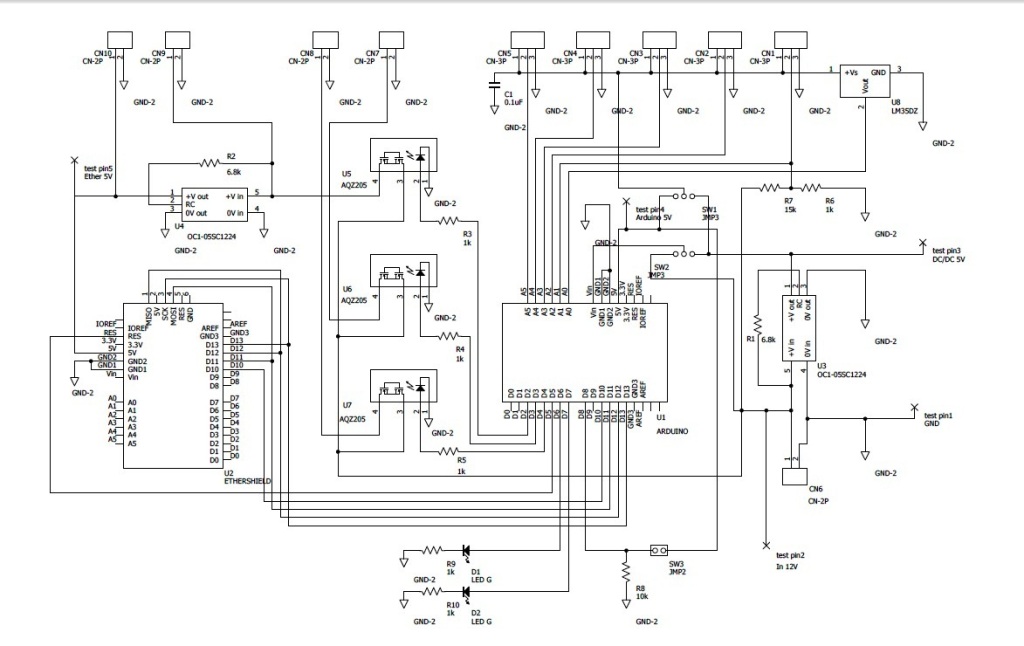
専用に開発した拡張ボード(FS Shield)上に小型コンピュータであるArduino UnoやLAN接続を行うためのEthernet Shieldなどを組み合わせた、汎用的な計測・制御装置である。FSクラシックに搭載される。FSエンジンの外観写真および回路図を以下に示す。
【基本情報】
FSエンジンに関する電子回路情報は以下を参照 (「図面関係」からもダウンロード可)。ガバーデータを基板製造メーカ
(p板.comなど)に渡すことでFS Shield基板を入手可能。
ユニバーサル基板で自作する場合は、Arduino Uno, Ethernet Shield
のデジタル7~8番ピンの間隔がずれているので要注意。自作例はこちら。
【部品リスト】
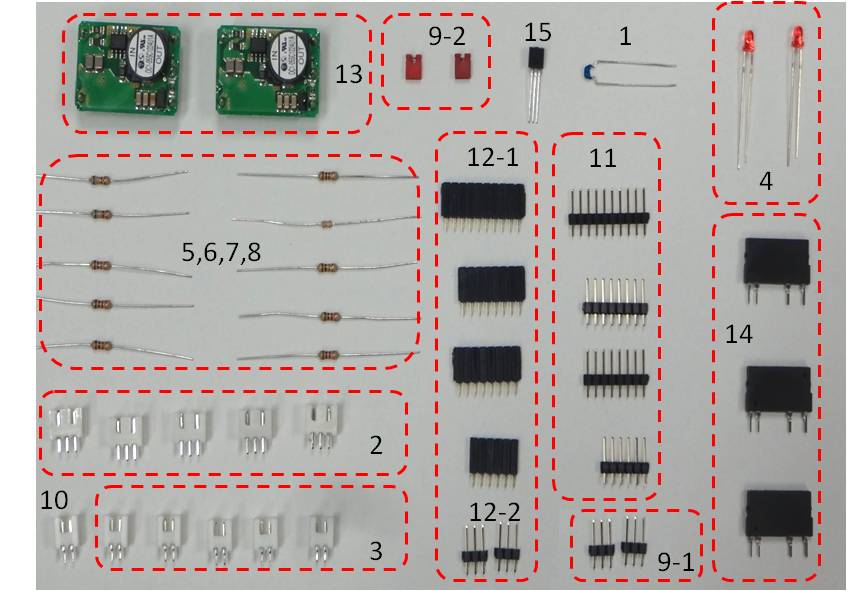
| No. | 部品 | 型番 | 個数 | 記号 | 単価 | 備考 |
| 1 | コンデンサ | 0.1uF | 1 | C1 | @10 | 10個入り |
| 2 | コネクタ | JST CN-3P トップ型 | 5 | CN1-5 | @21 | |
| 3 | コネクタ | JST CN-2P トップ型 | 5 | CN6-10 | @21 | |
| 4 | LED | Φ3mm赤色(裏面実装) | 2 | D1,D2 | @1 | 10個入り |
| 5 | 抵抗 | 6.8kΩ | 2 | R1,R2 | @1 | 100個入り |
| 6 | 抵抗 | 1kΩ | 8 | R3-6,R9,R10 | @1 | 100個入り |
| 7 | 抵抗 | 15kΩ | 1 | R7 | @1 | 100個入り |
| 8 | 抵抗 | 10kΩ | 1 | R8 | @1 | 100個入り |
| 9-1 | ジャンパーピン | 1x3P | 2 | SW1, SW2 | 11-1流用 | |
| 9-2 | ピンヘッダ | 2.54mmピッチ | 2 | SW1, SW2 | @4 | 25個入り |
| 10 | コネクタ | JST CN-2P トップ型 | 1 | SW3 | @21 | |
| 11-1 | ピンヘッダ | 1x40Pを適宜カット | 1 | U1 | @40 | |
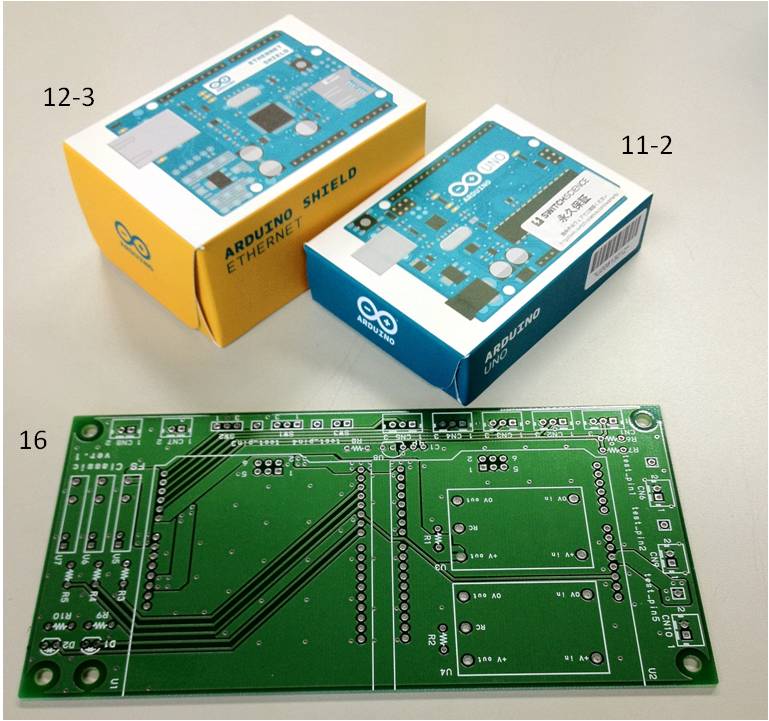
| 11-2 | CPUボード | Arduino Uno R3 | 1 | U1 | @3240 | |
| 12-1 | ピンソケット | 1x42Pを適宜カット | 1 | U2 | @80 | |
| 12-2 | ピンヘッダ | 1x40Pを適宜カット | 1 | U2 | 11-1流用 | |
| 12-3 | 拡張ボード | Ethernet Shield R3 | 1 | U2 | @4590 | |
| 13 | DCコンバータ | OC1-05SC1224U1A | 2 | U3, U4 | @1171 | |
| 14 | フォトモスリレー | パナソニック AQZ205 | 3 | U5-7 | @730 | |
| 15 | 温度センサ | NS LM35DZ | 1 | U8 | @120 | |
| 16 | 基板 | FS-classic ver.1 | 1 | @1493 | 20枚発注時 |
【組み立て時の注意点】
基板はガバーデータをもとに基板製造メーカに発注することで入手可能。
入力電圧をモニタリングするときはCN1が不要。逆にA/D入力ポートを増やしたい場合はR6, R7を除去。
CN1-5は1pinが5V、2pinが測定電圧、3pinがGND。CN6-10は1pinが12V/5V、2pinがGNDとなる。
SW1のジャンパーは、1-2短絡時にArduinoから5V供給、2-3短絡時にDCコンバータ(U3)から供給。デフォルトは2-3を短絡。
SW2のジャンパーは、1-2短絡時にArduinoへ12Vを供給、2-3短絡時にArduinoへ5Vを共有(非推奨)。デフォルトは1-2を短絡。消費電力を抑える場合はジャンパーを外し、3pinとArduinoのUSB 5V入力部分を直結する(自己責任で)。
U1はピンヘッダを介してArduino Unoを接続。ピンヘッダは1x40Pを適宜カットし、1x6P、1x8P、1x8P、1x10Pを作成して使用。2x3P部分は何も接続しない。
U2はピンソケットとピンヘッダを介してEthernet Shieldを接続。ピンソケットは1x42Pを適宜カットし、1x6P、1x8P、1x8P、1x10Pを作成、ピンヘッダは上記1x40Pを適宜カットし、1x3P、1x3Pを作成して使用。
U6、U7は状況(電動ファンやカメラモジュールが常時ONで問題ない場合)によっては不要。その場合は3pinと4pinを短絡させるか、CN10を分岐して利用。
12V(CN9)/5V(CN10)の電源出力はU4、U5によって制御。誤接続を防ぐため、接続する通信モジュールの電源電圧と異なる方のコネクタは取り付けないか、間違えて差さないよう対処する。
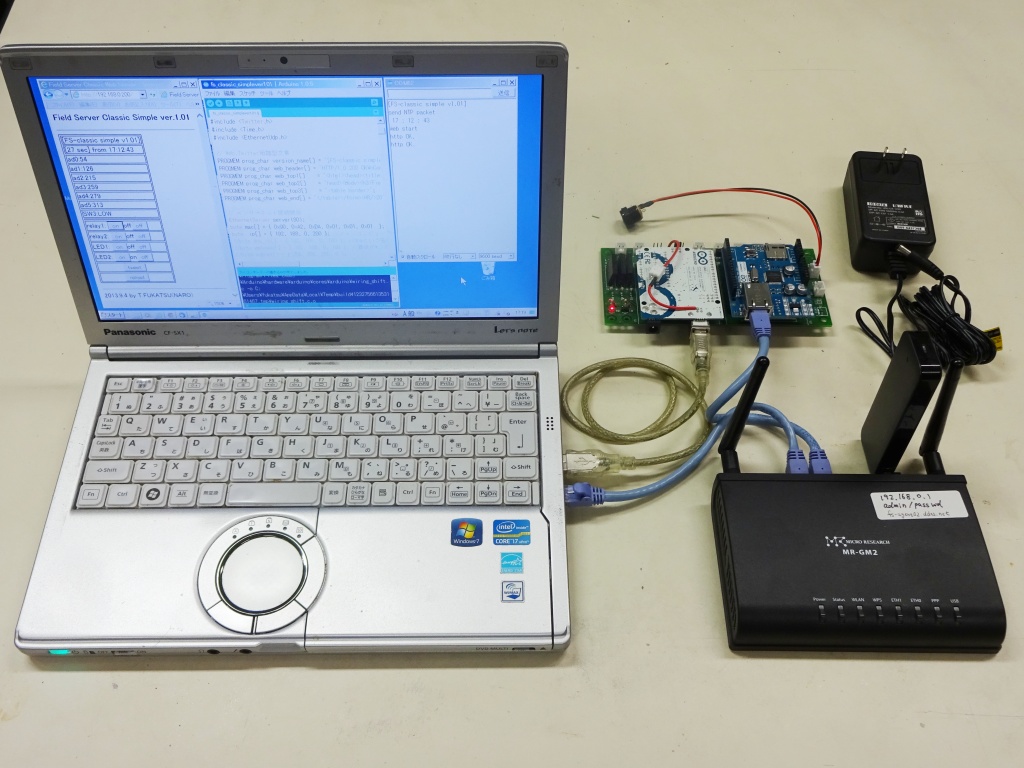
【動作確認】
サンプルプログラムを用いて動作確認を行う。この作業を行うにあたり、事前に
を用意したのち、以下の作業を行う。「参考資料」も併せて参照。
PCでArduinoが動かせるよう、IDE開発環境をインストールする。
プログラムをコンパイルする上で必要となる外部ライブラリを登録する。
Arduinoを単体でPCとUSBケーブル接続し、適当なサンプルスケッチ(「ファイル」-「スケッチの例」-「01.Basics」など)を実行してArduino側に問題がないか確認する。
ルーターにPC、FSエンジンを接続してアクセスできるようIPを設定する。通常は、PCはDHCPによる自動設定のまま、FSエンジンはサブネット内の未使用IPを割り振る。
PCとFSエンジンを直接LANケーブルで接続する場合は、PCのIPを手動設定する。
(ex. PC:192.168.0.2/255.255.255.0/192.168.0.1(GW/DNS)、FSエンジン:192.168.0.200)
PCにFSエンジン動作確認用サンプルスケッチをダウンロードする(「図面関係」参照)。
スケッチ内のIPアドレス(上記参照)、MACアドレス(Ethernet
Shield裏面)を変更する。
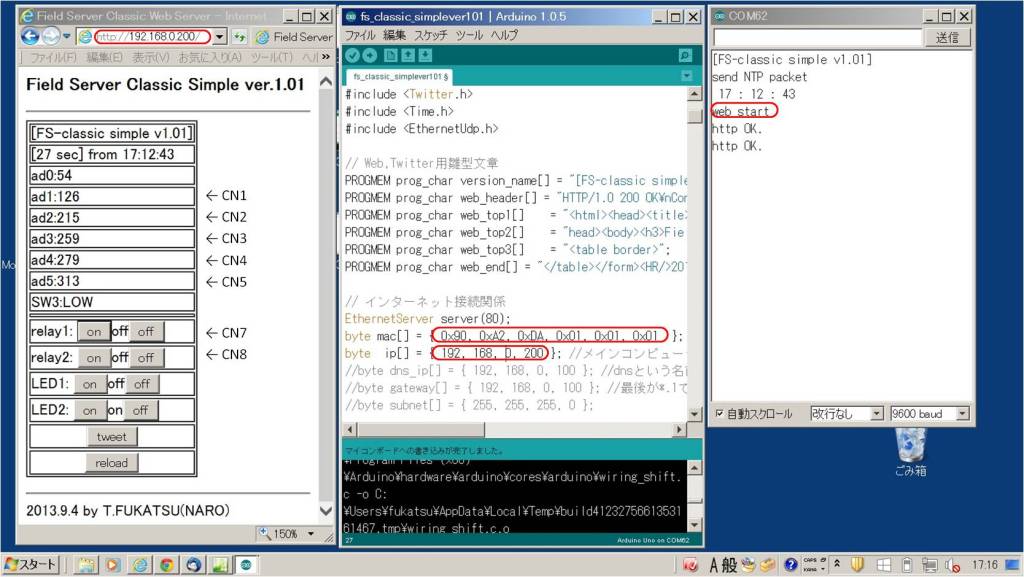
FSエンジンにArduinoを戻し、LANケーブル、USBケーブルを接続した状態で、電源ソケット付ケーブル(CN6に接続)を介して12Vを供給する。
スケッチをアップロードし、シリアルモニタを開いて起動を確認する(web startと表示されればOK)。FSエンジンは、D1, D2のLEDが点灯、NTP時刻同期が成功するとD1は消灯。
WebブラウザでFSエンジンのIPアドレスを入力し、Web上で動作確認する。AD入力(CN1~5)は2pinを5V,GNDのどちらかに短絡させて確認、SW3も短絡/解放で確認、CN7, CN8はrelayスイッチを変えながらテスタで12V出力を確認。CN9, CN10も出力電圧を確認。
Copyright (C) 2014- T.Fukatsu@NARO All Rights Reserved.
{kind=link}